 |
|
 Другие алгоритмы. |
Игры, и все с ними связанное. |
Smart Moves: Intelligent Pathfinding.
'Алгоритмы поиска пути'
Original
article © Brian Stout, 1997
Translation into Russian © Maxim Kamensky, 2000
Оригинал перевода и возможные дополнения на skael.nm.ru
Хотя поиск пути не тривиальная задача, существует несколько хороших, надежных алгоритмов, которые заслуживают большей известности в сообществе разработчиков.
Некоторые алгоритмы поиска пути не очень эффективны, но их изучение позволяет постепенно вводить концепции. Так можно понять, как решаются различные проблемы.
Типичной проблемой в поиске пути является обход препятствий. Наипростейшим подходом к проблеме является игнорирование препятствий до столкновения с ними. Такой алгоритм будет выглядеть примерно так:
Пока не цель не достигнута Выбрать направление для движения к цели Если это направление свободно для движения Двигаться туда Иначе Выбрать другое направление в соответсвии со стратегией обхода
Этот подход прост, так как он предъявляет совсем немного требований: все, что необходимо знать - это относительные положения объекта и его цели, и признак блокирования препятствием. Для многих игровых ситуаций этого достаточно.
Различные стратегии обхода препятсвий включают в себя:
Хотя техники обхода препятствий рассмотренные выше часто могут проделать допустимую или даже адекватную работу, существуют ситуации, в которых единственно разумный подход это планирование всего пути перед началом перемещений. В дополнение, эти методы не могут решить проблему взвешенных областей, которая состоит не столько в обходе препятствий, сколько в поиске пути с наименьшей стоимостью среди других вариантов, где стоимость местности может изменяться.
К счастью, в областях теории графов и обычного ИИ имеется несколько алгоритмов, которые могут решить проблему и сложных препятствий и взвешенных областей. В литературе, многие из этих алгоритмов представлены в терминах изменения состояний или прохода по узлам графа. Это зачастую используется для решения множества проблем, включая "пятнашки" и кубик Рубика, где состоянием является сочетание цифр или кубиков, и соседние состояния (или смежные узлы) посещаются путем перемещения цифр или поворота граней кубика. Применение этих алгоритмов к поиску пути в геометрическом пространстве требует простой адаптации: состояние или узел графа представляют объект, находящийся в определенной клетке, и передвижение в соседние клетки соответствует перемещению в соседние состояния или смежные узлы.
Рассматривая алгоритмы от простейших к более надежным, имеем:
Алгоритм последовательных приближений при поиске в глубину (IDDFS). В действительности в алгоритме поиска в глубину существует еще одна проблема - выбор правильной глубины остановки. Если она будет слишком маленькой, то путь не будет найден; если слишком большой, то потенциально можно потратить много времени впустую, исследуя слишком глубоко, или найти путь с очень высокой стоимостью. Эти проблемы решаются итеративным углублением - техника, при которой выполняется поиск в глубину с увеличивающейся глубиной до тех пор, пока путь не будет найден. При поиске пути мы можем не начинать с глубины равной единице, а сразу начать с глубины равной расстоянию по прямой от старта к цели. Этот поиск является асимптотически оптимальным среди всех переборных алгоритмов по времени и памяти.
Наилучшим алгоритмом для поиска оптимальных путей в различных пространствах является A* (читается как "А-звездочка"). Этот эвристический поиск сортирует все узлы по приближению наилучшего маршрута, идущего через этот узел. Типичная формула эвристики выражается в виде:
f(n) = g(n) + h(n)
где:
f(n) значение оценки, назначенное узлу
n
g(n)
наименьшая стоимость прибытия в узел n из точки старта
h(n) эвристическое приближение
стоимости пути к цели от узла n
| Таким образом, этот алгоритм сочетает в себе учет длины
предыдущего пути из алгоритма Дийкстры с эвристикой из алгоритма
"лучший-первый". Алгоритм хорошо отражен в листинге 3. Так как некоторые
узлы могут обрабатываться повторно (для поиска оптимальных путей к ним
позднее) необходимо ввести новый список Closed для их отслеживания.
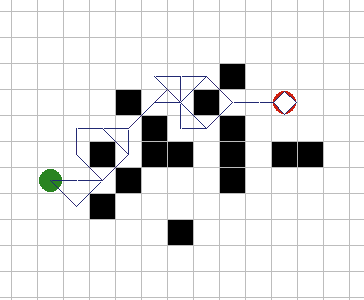
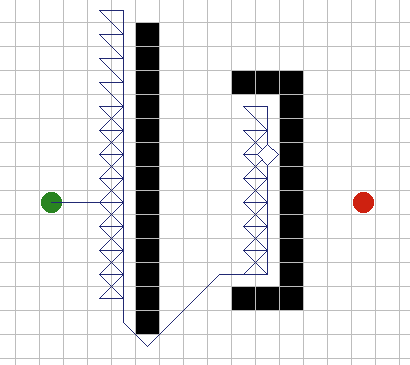
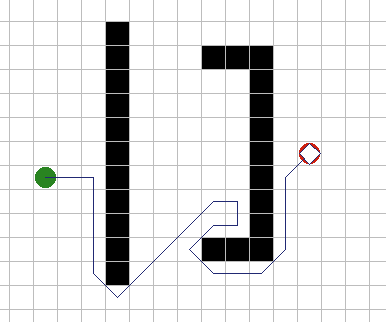
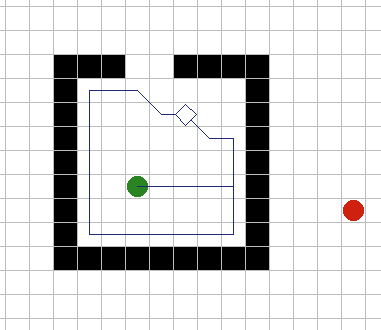
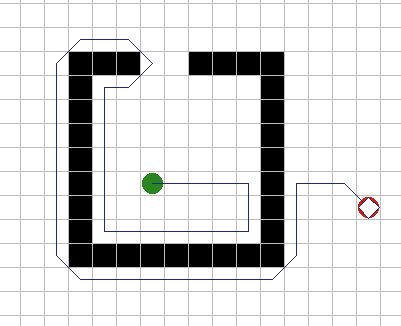
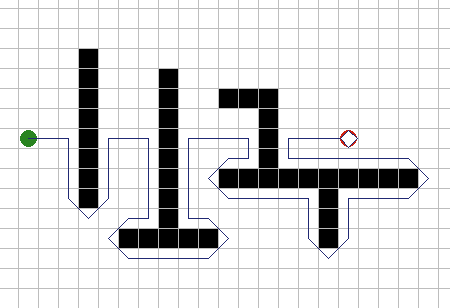
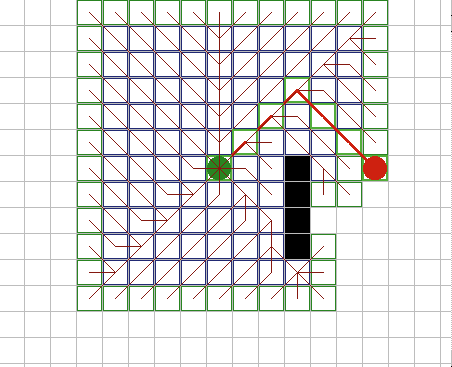
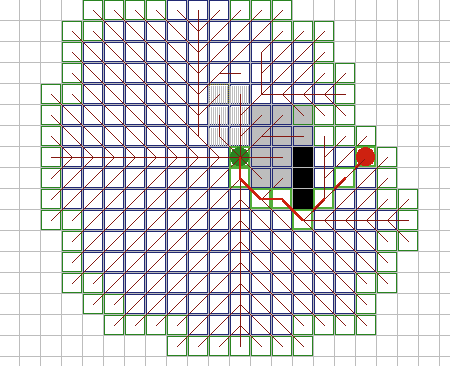
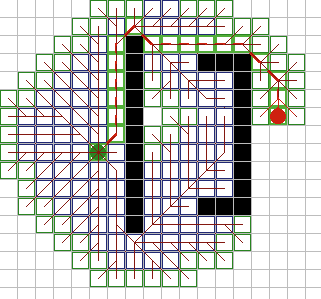
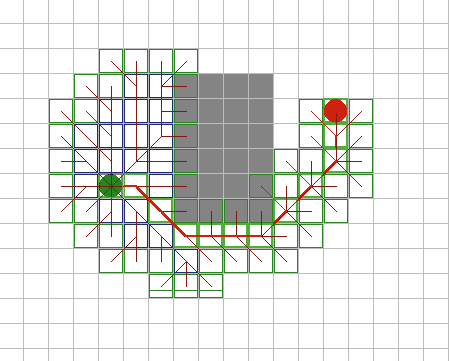
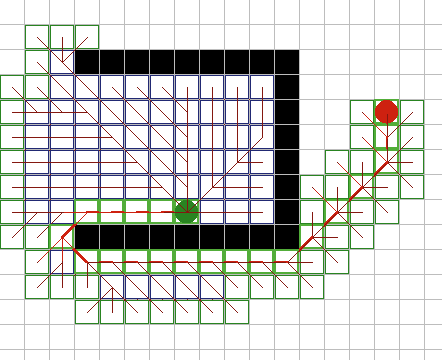
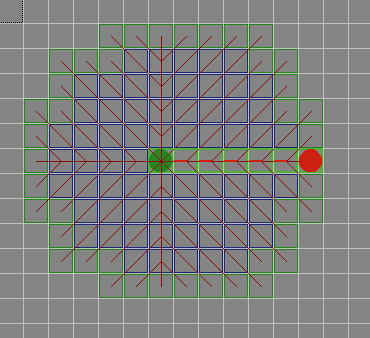
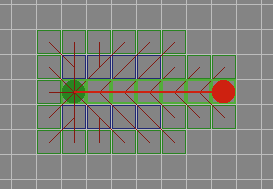
A* имеет множество интересных свойств. Он гарантированно находит кратчайший путь, до тех пор пока эвристическое приближение h(n) является допустимым, то есть он никогда не превышает действительного оставшегося расстояния до цели. Этот алгоритм наилучшим образом использует эвристику: ни один другой алгоритм не раскроет меньшее число узлов, не учитывая узлов с одинаковой стоимостью. На рисунках 9A - 9C, можно увидеть как A* справляется с ситуациями проблемными для других алгоритмов. |
Рис. 9А. |
Иерархический поиск. Рассмотрим способы, как добиться от A* большей эффективности в рассматриваемых областях.
Возможно самой главной оптимизацией, которую только можно сделать, является реструктуризация проблемы в более простую. Макрооператоры - это последовательности шагов, которые принадлежат друг другу и могут быть объединены в один шаг, заставляя поиск делать большие шаги за один раз. Например, самолеты делают серию шагов для того, чтобы изменить свои положение и высоту. Общая последовательность может быть использована как одно изменение состояния, вместо множества маленьких отдельных шагов. В дополнение к сказанному, поиск и общие методы решения задач могут быть значительно упрощены, если они будут разбиты на подзадачи, индивидуальное решение каждой из которых довольно простое. В случае поиска пути, карта разбивается на большие непрерывные области, чья связность известна. Выбирается одна или две граничных ячейки, которые находятся между двумя смежными областями; затем поиск производится между смежными областями, в каждой из которых путь находится для граничных ячеек.
Например, в стратегической карте Европы, планировщик пути прокладывающий путь из Мадрида в Афины может с большой вероятностью потратить кучу времени на обработку итальянского "сапога". Используя страны в качестве областей, иерархический планировщик сначала определит, что путь должен следовать из Испании во Францию, затем в Италию, и из Югославии (если смотреть на старую карту) в Грецию; и затем путь через Италию должен вести от границей между Италией и Францией до границы между Италией и Югославией. В качестве другого примера можно привести путь из одной части здания в другое, который может быть разбит на пути между комнатами и коридорами и пути между дверьми в каждой комнате.
Гораздо проще выбирать области в предопределенных картах, чем заставлять делать это компьютер на случайно сгенерированных картах. Необходимо отметить, что обсуждаемые примеры работают в основном с обходом препятствий; для взвешенных областей желательно назначать полезные области, особенно для компьютера (они могут быть и не совсем полезные).
Реализация А* в играх. Хотя поиск А* сам по себе достаточно эффективен, он может быть замедлен неэффективными алгоритмами работы с внутренними структурами данных. Для поиска используются две основных структуры данных.
Первая - это представление игровой области. Тут возникает много вопросов. Как игровая область должна быть представлена? Будут ли области доступны из каждой точки? Стоимости перемещения будут храниться непосредственно в карте или будут вычисляться по необходимости? Как будут представлены различные особенные точки в областях на карте? Будут ли они представлены непосредственно на карте или в отдельных структурах? Как алгоритм поиска может быстро получить необходимую информацию? Ответы на эти вопросы зависят от типа игры и используемого программного и аппаратного обеспечения.
Другая основная используемая структура - это узел или состояние поиска, который можно рассмотреть более детально. На нижнем уровне находится структура состояния поиска, в которую разработчик может захотеть включить следующие поля:
- Место (координаты) на карте, рассматриваемое в этом состоянии.
- Другие существенные атрибуты объекта, например, ориентация и скорость.
- Стоимость лучшего пути к этой позиции из исходной позиции.
- Длина пути к этой позиции.
- Эвристическое приближение h(n) (стоимости оставшегося пути к цели).
- Оценка для этого состояния f(n), используемая для выбора следующего состояния извлекаемого из Open.
- Предел длины пути, или его стоимости, или того и другого вместе, если необходимо.
- Ссылка (указатель или индекс) на родителя этого узла, то есть узла который привел к этому состоянию.
- Дополнительные ссылки на другие узлы, как это требуют структуры хранения данных, используемые для хранения списков Open и Closed; например, "next" и возможно "previous" указатели для связанных списков, "right", "left" и "parent" указатели для двоичных деревьев.
Другим вопросом является решение - когда распределять память под эти структуры? Ответ зависит от требований и ограничений игры, аппаратного обеспечения и операционной системы.
На верхнем уровне находятся более сложные структуры данных - списки Open и Closed. Хотя их раздельное хранение типично, можно хранить их вместе, используя флажок в узле для определения открыт этот узел или нет. Вот виды операций, которые необходимы для работы со списком Closed:
- Добавить новый узел.
- Удалить произвольный узел.
- Искать узел с заданными атрибутами (положение, скорость, направление).
- Очистить список в конце поиска.
Для списка Open нужны такие же операции, как для списка Close, плюс:
- Извлечь узел с лучшей оценкой f(n).
- Изменить оценку узла.
Список Open можно рассматривать как приоритетную очередь, где следующий извлеченный узел является узлом с высшим приоритетом - в нашем случае с наилучшей оценкой. В соответствии с указанными выше операциями есть несколько возможных представлений: линейный, неупорядоченный массив; неупорядоченный связанный список; сортированный массив; сортированный связанный список; куча (структура используемая в heapsort); сбалансированные бинарные деревья. Существует несколько типов бинарных деревьев: 2-3-4 деревья, красно-черные деревья, сбалансированные по глубине (AVL trees), и сбалансированные по весу деревья. Кучи и сбалансированные деревья имеют преимущество логарифмической зависимости времени вставки, удаления и поиска; однако, если количество узлов очень велико, затраты на их хранение могут превысить это преимущество.
Оптимизация А*. Существует несколько способов изменить алгоритм поиска, чтобы получить хорошие результаты при использовании ограниченных ресурсов:
Лучевой поиск. Одним из способов борьбы с ограничением по памяти является наложение ограничений на количество узлов в списке Open; когда список полон и необходимо добавить новый узел, просто выбрасывается узел с наихудшим значением. Список Closed также может быть уничтожен, если каждая ячейка хранит в себе длину наилучшего пути и обратный указатель. Этот алгоритм не гарантирует оптимальности пути, так как узел ведущий к нему может быть выброшен, но все равно может позволить найти разумный путь.
Алгоритм последовательных приближений для A* (IDA*). Алгоритм последовательных приближений, использованный для IDDFS, как упоминалось ранее, может быть использован и для A*. Это полностью избавляет от необходимости хранить списки Open и Closed. Делается простой рекурсивный поиск, собирается наколенная стоимость пути g(n), и поиск прекращается при достижении значением f(n) = g(n) + h(n) заданных пределов. Начинать нужно с пределом остановки равным h(start), и в каждой последовательной итерации, устанавливать новый предел остановки равным минимальному значению f(n), которое превысило прежнюю границу. Аналогично для IDDFS среди методов полного перебора, IDA* - асимптотически оптимален в расходе времени и памяти среди эвристических методов.
Недопустимая эвристика h(n). Как обсуждалось выше, если эвристическое приближение оставшейся стоимости пути слишком мало, то A* может быть очень неэффективным. Но если приближение слишком высоко, то для найденного пути не гарантируется оптимальность. В играх в которых диапазон изменения стоимостей ландшафта широк - от болот до автострад - можно поэкспериментировать с различными промежуточными значениями, чтобы найти точный баланс между эффективностью поиска и качеством найденного пути.
Существуют и другие модификации A*, однако они не подтвердили свою полезность для поиска пути в геометрическом пространстве.
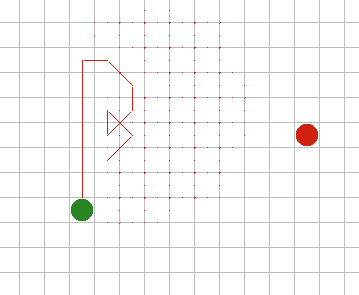
Непрерывное игровое пространство. Все приведенные выше методы поиска предполагали, что пространство разбито на квадратные или шестиугольные ячейки. Но что, если игровое пространство непрерывно? Что, если позиции и объектов и препятствий сохранены в виде непрерывных значений и могут быть настолько точно представлены, как и разрешение экрана? Рисунок 11A показывает примерное расположение объектов. Для ответа на эти условия поиска, можно заглянуть в область робототехники и увидеть какие подходы используются для мобильных роботов. Не удивительно, что многие подходы находят способы для сведения непрерывного пространства к нескольким дискретным вариантам. После этого, они обычно используют A* для поиска желаемого пути. Способы дискретизации пространства включают:
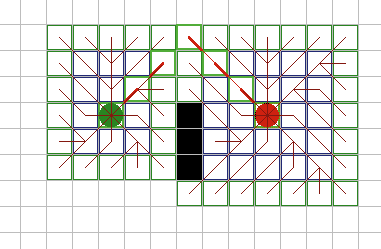
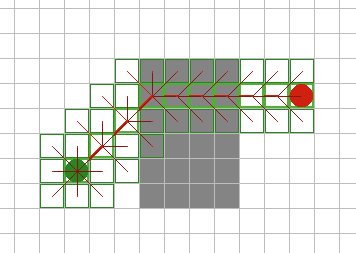
Ячейки. Простым подходом является нанесение ячеистой сетки на поверхность пространства поиска. Ячейки, содержащие часть или все препятствие, обозначаются занятыми; цепочка ячеек, касающихся заблокированных ячеек, также помечаются блокированными для разрешения передвижения без столкновений. Это представление также полезно для проблемы взвешенных областей. (См. рис. 11B.)
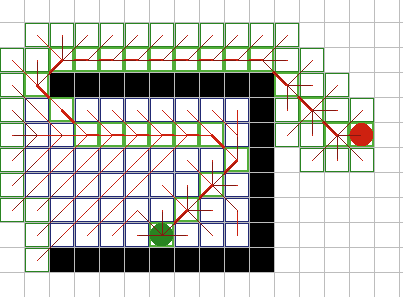
Точки видимости. Для проблем обхода препятствий, можно сфокусироваться на критических точках, в основном на расположенных возле вершин препятствий (на достаточном расстоянии, чтобы избежать столкновений), при этом точки считаются соединенными, если они видимы между собой (то есть, между ними нет препятствий). Для любого пути, поиск рассматривает в качестве промежуточных шагов между стартом и целью только критические точки. Смотрите рисунок 11C.
Выпуклые полигоны. Для обхода препятствий, пространство не занимаемое полигональными препятствиями разбивается на выпуклые полигоны; промежуточными точками могут быть центры полигонов или точки на границах полигонов. Существует несколько схем декомпозиции пространства: C-Cells (каждая вершина соединяется с ближайшей видимой вершиной; эти линии разбивают пространство) и разложении на максимальные области (каждая выпуклая вершина препятствия проектирует грани, составляющие вершину, на ближайшие препятствия или стены; из этих двух сегментов и сегмента примыкающего к ближайшей видимой вершине выбирается кратчайший). (См. рис. 11D.) Для проблемы взвешенных областей, пространство разделяется на полигоны с однородной стоимостью проходимости. Точки используемые при пересечении границ вычисляются по закону преломления Снелла. Этот подход избавляет от иррегулярных путей, найденных другими способами.
Квадрантные деревья. Подобно выпуклым полигонам пространство разделяется на квадраты. Каждый квадрат, не являющийся однородным, разделяется на четыре меньших квадрата. Центры этих квадратов используются для поиска пути. (См. рис. 11E.)
Обобщенные цилиндры. Пространство между смежными препятствиями рассматривается как цилиндр, форма которого изменяется вдоль его оси. Вычисляется ось, проходящая через пространство между двумя смежными препятствиями (включая стены), и эти оси используются для поиска пути. (См. рис. 11F.)
Потенциальные поля. Этот подход, не требующий ни квантизации пространства, ни полных предварительных расчетов, считает, что каждое препятствие имеет вокруг себя отталкивающее потенциальное поле, сила которого обратно пропорциональна расстоянию до него; так же существует однородная сила притяжения к цели. Через близкие постоянные интервалы времени вычисляется сумма притягивающих и отталкивающих векторов и объект передвигается в этом направлении. Проблема этого подхода состоит в попадании объекта в локальный минимум; существуют различные способы выезда из таких точек.
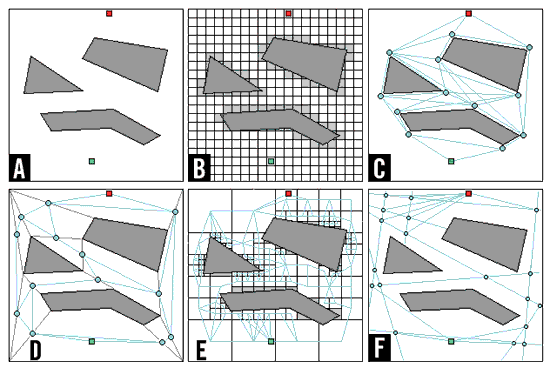
Рис. 11.
Original
article © Brian Stout, 1997
Translation into Russian © Maxim Kamensky,
2000
Оригинал перевода и возможные дополнения на skael.nm.ru